Surface and collision properties
Surface and collision properties¶
The simulation objects can include collision properties such as friction, bounce and contact parameters set to an individual link.
from pcg_gazebo.simulation import create_object
# If there is a Gazebo instance running, you can spawn the box into the simulation from pcg_gazebo.task_manager import Server # First create a simulation server server = Server() # Create a simulation manager named default server.create_simulation('friction') simulation = server.get_simulation('friction') # Run an instance of the empty.world scenario # This is equivalent to run # roslaunch gazebo_ros empty_world.launch # with all default parameters simulation.create_gazebo_empty_world_task() # A task named 'gazebo' the added to the tasks list print(simulation.get_task_list()) # But it is still not running print('Is Gazebo running: {}'.format(simulation.is_task_running('gazebo'))) # Run Gazebo simulation.run_all_tasks()
['gazebo'] Is Gazebo running: False
from pcg_gazebo.generators import WorldGenerator import random # Create a Gazebo proxy gazebo_proxy = simulation.get_gazebo_proxy() # Use the generator to spawn the model to the Gazebo instance running at the moment generator = WorldGenerator(gazebo_proxy=gazebo_proxy)
Friction¶
obj = create_object('box') # By changing the size, collision, visual and inertial # properties are already going to be updated obj.size = [0.8, 0.7, 0.9] obj.add_inertial(30) # Print the initial state of a box in the model option print(obj.to_sdf('model'))
<model name="box">
<link name="box">
<inertial>
<inertia>
<izz>2.825</izz>
<iyz>0.0</iyz>
<iyy>3.6250000000000004</iyy>
<ixx>3.25</ixx>
<ixy>0.0</ixy>
<ixz>0.0</ixz>
</inertia>
<mass>30.0</mass>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
</inertial>
<visual name="visual">
<geometry>
<box>
<size>0.8 0.7 0.9</size>
</box>
</geometry>
<transparency>0.0</transparency>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
<cast_shadows>1</cast_shadows>
</visual>
<collision name="collision">
<geometry>
<box>
<size>0.8 0.7 0.9</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
</collision>
</link>
<allow_auto_disable>0</allow_auto_disable>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
<static>0</static>
</model>
# Set default friction parameters obj.collision.enable_property('friction') print(obj.to_sdf('model'))
<model name="box">
<link name="box">
<inertial>
<inertia>
<izz>2.825</izz>
<iyz>0.0</iyz>
<iyy>3.6250000000000004</iyy>
<ixx>3.25</ixx>
<ixy>0.0</ixy>
<ixz>0.0</ixz>
</inertia>
<mass>30.0</mass>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
</inertial>
<visual name="visual">
<geometry>
<box>
<size>0.8 0.7 0.9</size>
</box>
</geometry>
<transparency>0.0</transparency>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
<cast_shadows>1</cast_shadows>
</visual>
<collision name="collision">
<geometry>
<box>
<size>0.8 0.7 0.9</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<friction>
<torsional>
<use_patch_radius>1</use_patch_radius>
<ode>
<slip>0</slip>
</ode>
<surface_radius>0</surface_radius>
<patch_radius>0</patch_radius>
<coefficient>1</coefficient>
</torsional>
<ode>
<fdir1>0 0 0</fdir1>
<mu>1</mu>
<slip2>0</slip2>
<mu2>1</mu2>
<slip1>0</slip1>
</ode>
<bullet>
<rolling_friction>1</rolling_friction>
<friction>1</friction>
<fdir1>0 0 0</fdir1>
<friction2>1</friction2>
</bullet>
</friction>
</surface>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
</collision>
</link>
<allow_auto_disable>0</allow_auto_disable>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
<static>0</static>
</model>
obj.collision.set_ode_friction_params( mu=0.9, mu2=0.5, slip1=0.3, slip2=0.5, fdir1=[0, 0, 0] ) print(obj.to_sdf('model'))
<model name="box">
<link name="box">
<inertial>
<inertia>
<izz>2.825</izz>
<iyz>0.0</iyz>
<iyy>3.6250000000000004</iyy>
<ixx>3.25</ixx>
<ixy>0.0</ixy>
<ixz>0.0</ixz>
</inertia>
<mass>30.0</mass>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
</inertial>
<visual name="visual">
<geometry>
<box>
<size>0.8 0.7 0.9</size>
</box>
</geometry>
<transparency>0.0</transparency>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
<cast_shadows>1</cast_shadows>
</visual>
<collision name="collision">
<geometry>
<box>
<size>0.8 0.7 0.9</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<friction>
<torsional>
<use_patch_radius>1</use_patch_radius>
<ode>
<slip>0</slip>
</ode>
<surface_radius>0</surface_radius>
<patch_radius>0</patch_radius>
<coefficient>1</coefficient>
</torsional>
<ode>
<slip1>0.3</slip1>
<mu>0.9</mu>
<slip2>0.5</slip2>
<mu2>0.5</mu2>
<fdir1>0 0 0</fdir1>
</ode>
<bullet>
<rolling_friction>1</rolling_friction>
<friction>1</friction>
<fdir1>0 0 0</fdir1>
<friction2>1</friction2>
</bullet>
</friction>
</surface>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
</collision>
</link>
<allow_auto_disable>0</allow_auto_disable>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
<static>0</static>
</model>
obj.collision.set_bullet_friction_params( friction=0.8, friction2=0.9, fdir1=[0, 0, 0], rolling_friction=1 ) print(obj.to_sdf('model'))
<model name="box">
<link name="box">
<inertial>
<inertia>
<izz>2.825</izz>
<iyz>0.0</iyz>
<iyy>3.6250000000000004</iyy>
<ixx>3.25</ixx>
<ixy>0.0</ixy>
<ixz>0.0</ixz>
</inertia>
<mass>30.0</mass>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
</inertial>
<visual name="visual">
<geometry>
<box>
<size>0.8 0.7 0.9</size>
</box>
</geometry>
<transparency>0.0</transparency>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
<cast_shadows>1</cast_shadows>
</visual>
<collision name="collision">
<geometry>
<box>
<size>0.8 0.7 0.9</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<friction>
<torsional>
<use_patch_radius>1</use_patch_radius>
<ode>
<slip>0</slip>
</ode>
<surface_radius>0</surface_radius>
<patch_radius>0</patch_radius>
<coefficient>1</coefficient>
</torsional>
<ode>
<slip1>0.3</slip1>
<mu>0.9</mu>
<slip2>0.5</slip2>
<mu2>0.5</mu2>
<fdir1>0 0 0</fdir1>
</ode>
<bullet>
<rolling_friction>1.0</rolling_friction>
<friction>0.8</friction>
<fdir1>0 0 0</fdir1>
<friction2>0.9</friction2>
</bullet>
</friction>
</surface>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
</collision>
</link>
<allow_auto_disable>0</allow_auto_disable>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
<static>0</static>
</model>
# Set default bounce parameters obj.collision.enable_property('bounce') print(obj.to_sdf('model'))
<model name="box">
<link name="box">
<inertial>
<inertia>
<izz>2.825</izz>
<iyz>0.0</iyz>
<iyy>3.6250000000000004</iyy>
<ixx>3.25</ixx>
<ixy>0.0</ixy>
<ixz>0.0</ixz>
</inertia>
<mass>30.0</mass>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
</inertial>
<visual name="visual">
<geometry>
<box>
<size>0.8 0.7 0.9</size>
</box>
</geometry>
<transparency>0.0</transparency>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
<cast_shadows>1</cast_shadows>
</visual>
<collision name="collision">
<geometry>
<box>
<size>0.8 0.7 0.9</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<friction>
<torsional>
<use_patch_radius>1</use_patch_radius>
<ode>
<slip>0</slip>
</ode>
<surface_radius>0</surface_radius>
<patch_radius>0</patch_radius>
<coefficient>1</coefficient>
</torsional>
<ode>
<slip1>0.3</slip1>
<mu>0.9</mu>
<slip2>0.5</slip2>
<mu2>0.5</mu2>
<fdir1>0 0 0</fdir1>
</ode>
<bullet>
<rolling_friction>1.0</rolling_friction>
<friction>0.8</friction>
<fdir1>0 0 0</fdir1>
<friction2>0.9</friction2>
</bullet>
</friction>
<bounce>
<restitution_coefficient>0</restitution_coefficient>
<threshold>100000</threshold>
</bounce>
</surface>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
</collision>
</link>
<allow_auto_disable>0</allow_auto_disable>
<pose frame="">0 0 0 0.0 -0.0 0.0</pose>
<static>0</static>
</model>
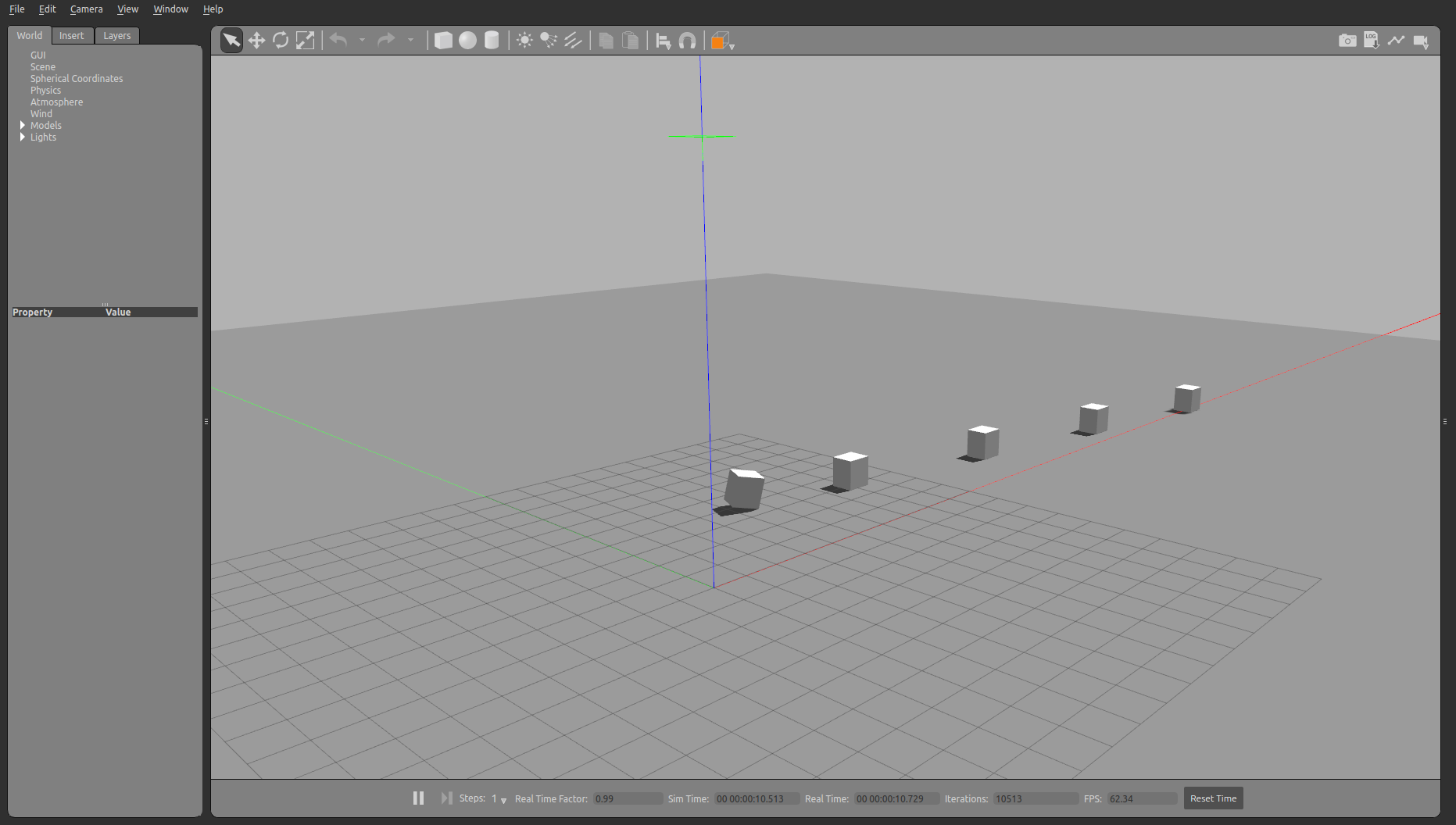
mu = [0.1, 0.3, 0.5, 0.7, 1.0] for i in range(len(mu)): obj.collision.set_ode_friction_params( mu=mu[i], mu2=mu[i]) generator.spawn_model( model=obj, robot_namespace='box_mu_{}'.format(mu[i]), pos=[0, i, 2])
from time import sleep sleep(2) for i in range(len(mu)): gazebo_proxy.apply_body_wrench( model_name='box_mu_{}'.format(mu[i]), link_name='box', force=[300, 0, 0], torque=[0, 0, 0], start_time=0, duration=2 )
# End the simulation by killing the Gazebo task sleep(5) simulation.kill_all_tasks()
The cuboids are created with different friction parameters and therefore will travel different distances when subjected to a horizontal force applied on their center of mass.